import arviz as az
import jax
import jax.numpy as jnp
import matplotlib.pyplot as plt
import numpy as np
import numpyro
import numpyro.distributions as dist
import pandas as pd
import preliz as pz
from jax import random
from numpyro.infer import Predictive
from numpyro_forecast import (
HMCForecaster,
eval_coverage,
eval_crps,
eval_mae,
eval_rmse,
forecasting_model,
)
from numpyro_forecast.functional import Horizon
from numpyro_forecast.typing import Array
az.style.use("arviz-darkgrid")
plt.rcParams["figure.figsize"] = [10, 6]
plt.rcParams["figure.dpi"] = 100
plt.rcParams["figure.facecolor"] = "white"
numpyro.set_host_device_count(n=4)
rng_key = random.PRNGKey(seed=42)
%load_ext autoreload
%autoreload 2
%load_ext jaxtyping
%jaxtyping.typechecker beartype.beartype
%config InlineBackend.figure_format = "retina"Exponential Smoothing in State Space Form
Write seasonal damped-trend exponential smoothing in innovations state space form so forecast uncertainty is propagated correctly, and fit it with Hamiltonian Monte Carlo.
Exponential Smoothing in State Space Form with numpyro_forecast
Exponential smoothing is one of the most widely used forecasting techniques. In its classical (component) form it is a set of recursive update equations for a level, a trend, and a seasonal component. A more powerful way to write the same idea is the innovations state space form (also known as the single source of error, or SSOE, model), which turns exponential smoothing into a proper generative stochastic process. The key consequence is that forecast uncertainty is propagated correctly: the prediction interval widens with the horizon instead of collapsing to the observation noise.
This notebook ports the blog post Exponential Smoothing with NumPyro: State Space Form (with material from its predecessor Notes on Exponential Smoothing with NumPyro) into a numpyro_forecast example. We show how to write the damped Holt-Winters model in state space form as a custom forecasting model that plugs into the package’s HMCForecaster, forecasting, and evaluation machinery, and we introduce the JAX scan primitive that rolls the latent state forward.
A practical note on the design: the built-in numpyro_forecast.functional.time_series and predict primitives assume a deterministic mean plus independent per-step Gaussian noise, which is not how an innovations model behaves. We therefore write the model body directly against the functional API’s Horizon value, registering the framework’s "obs" and "forecast" sites ourselves, while still reusing everything downstream of the model.
Prepare notebook
Generate synthetic data
We use the same synthetic series as the source posts: a seasonal cosine wave with period m = 15, a slow logarithmic trend, and additive Gaussian noise,
y_t = \cos(2 \pi t) + \log(t + 1) + 0.2 \, \varepsilon_t, \qquad \varepsilon_t \sim \text{Normal}(0, 1).
This gives us a trend, a clear seasonality, and enough noise to make the inference interesting. We hold out the last 20\% of the series as a test set.
n_seasons = 15
t = jnp.linspace(0, n_seasons + 1, (n_seasons + 1) * n_seasons)
rng_key, rng_subkey = random.split(rng_key)
y = jnp.cos(2 * jnp.pi * t) + jnp.log(t + 1) + 0.2 * random.normal(rng_subkey, t.shape)
n = y.shape[0]
n_train = int(0.8 * n)
t_train, t_test = t[:n_train], t[n_train:]
y_train, y_test = y[:n_train], y[n_train:]
# The package expects time at axis -2 and the observation dimension at axis -1.
train_data = y_train[:, None]
test_data = y_test[:, None]
# This univariate model has no exogenous regressors, so the covariates only carry
# the horizon length: zeros over the training window and over the full horizon.
covariates_train = jnp.zeros((n_train, 1))
covariates_full = jnp.zeros((n, 1))
future = n - n_train
print(f"total: {n}, train: {n_train}, test (forecast horizon): {future}")total: 240, train: 192, test (forecast horizon): 48We can visualize the series:
fig, ax = plt.subplots()
ax.plot(t_train, y_train, color="C0", label="train")
ax.plot(t_test, y_test, color="C1", label="test")
ax.axvline(float(t_test[0]), color="gray", linestyle="--", label="train/test split")
ax.legend(loc="upper left")
ax.set(title="Synthetic time series", xlabel="time", ylabel="y")
plt.show()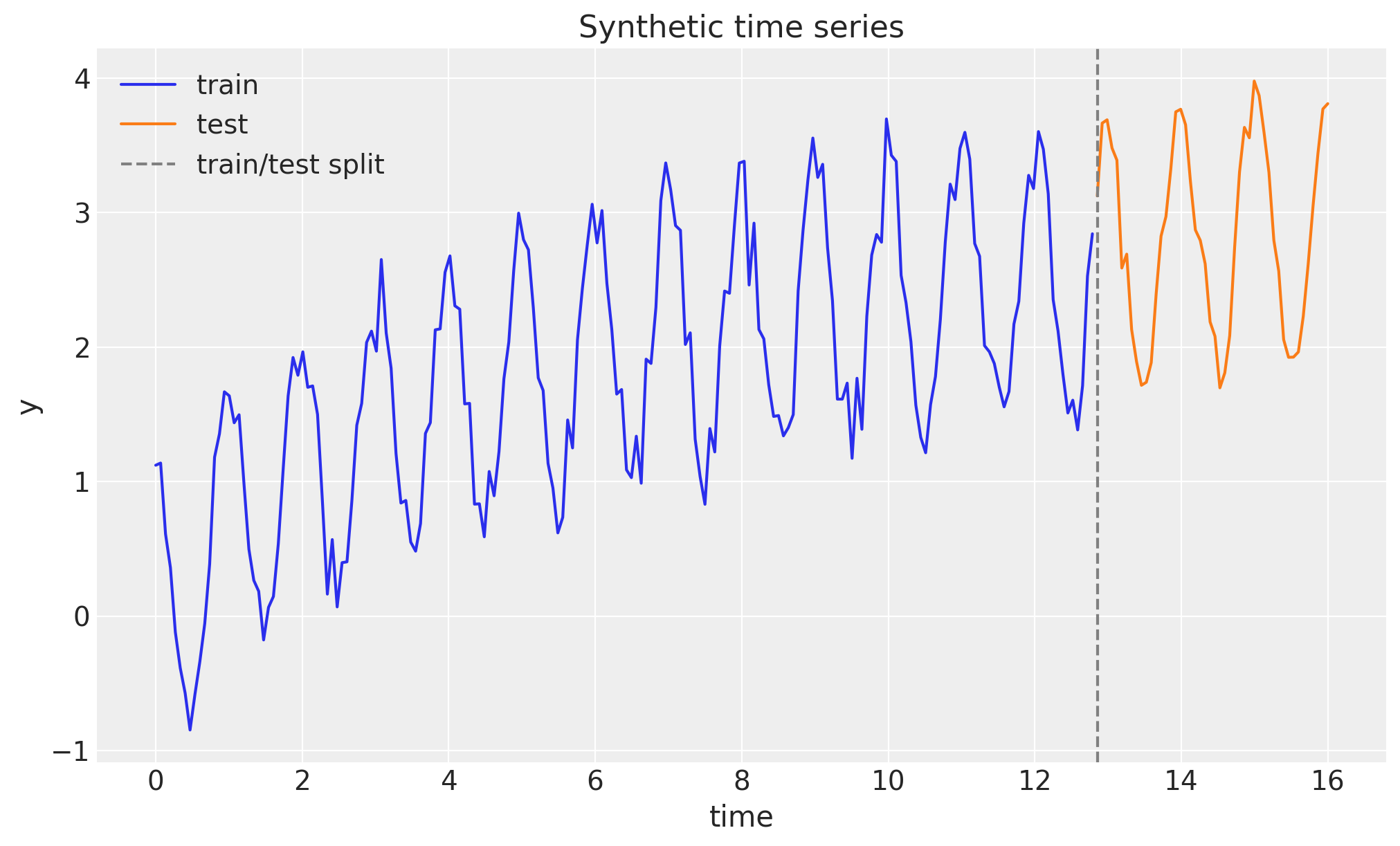
A short detour on scan
Exponential smoothing is defined by a recursion: each state depends on the previous one. In JAX we express such recursions with jax.lax.scan rather than a Python for loop, because scan compiles to a single efficient, differentiable operation. Conceptually scan is equivalent to the following pure-Python function (from the JAX documentation):
def scan(f, init, xs, length=None):
if xs is None:
xs = [None] * length
carry = init
ys = []
for x in xs:
carry, y = f(carry, x)
ys.append(y)
return carry, np.stack(ys)It threads a carry (the running state) through a step function f, and stacks the per-step outputs.
A simple example
As a warm-up, we use scan to compute the geometric damping sum \varphi_h = \varphi + \varphi^2 + \cdots + \varphi^h that appears in the damped-trend forecast formula below. The carry holds the running sum and the current power of \varphi.
def damping_sum(phi, h):
def step(carry, _):
running_sum, power = carry
power = power * phi
running_sum = running_sum + power
return (running_sum, power), running_sum
(total, _), partial_sums = jax.lax.scan(step, (0.0, 1.0), xs=None, length=h)
return total, partial_sums
phi_example = 0.8
total, partial_sums = damping_sum(phi_example, 5)
closed_form = sum(phi_example**i for i in range(1, 6))
print(f"scan result: {float(total):.5f}")
print(f"closed form: {closed_form:.5f}")
print(f"partial sums: {np.asarray(partial_sums).round(5)}")scan result: 2.68928
closed form: 2.68928
partial sums: [0.8 1.44 1.952 2.3616 2.68928]From component form to state space form
The classical damped Holt-Winters method with additive seasonality of period m is a set of recursive updates for the level \ell_t, the trend b_t, and the seasonal component s_t, together with an h-step forecast,
\begin{align*} \hat{y}_{t+h \mid t} &= \ell_t + \varphi_h \, b_t + s_{t + h - m(k+1)}, \\ \ell_t &= \alpha (y_t - s_{t-m}) + (1 - \alpha)(\ell_{t-1} + \varphi \, b_{t-1}), \\ b_t &= \beta^{*} (\ell_t - \ell_{t-1}) + (1 - \beta^{*}) \varphi \, b_{t-1}, \\ s_t &= \gamma (y_t - \ell_{t-1} - \varphi \, b_{t-1}) + (1 - \gamma) s_{t-m}, \end{align*}
where \alpha, \beta^{*}, \gamma \in (0, 1) are smoothing parameters, \varphi \in (0, 1) is the damping factor, \varphi_h = \varphi + \varphi^2 + \cdots + \varphi^h, and k = \lfloor (h-1)/m \rfloor.
The innovations state space form (SSOE) rewrites this as a generative model driven by a single error term \varepsilon_t shared across all equations,
\begin{align*} y_t &= \underbrace{\ell_{t-1} + \varphi \, b_{t-1} + s_{t-m}}_{\mu_t} + \varepsilon_t, \qquad \varepsilon_t \sim \text{Normal}(0, \sigma), \\ \ell_t &= \ell_{t-1} + \varphi \, b_{t-1} + \alpha \, \varepsilon_t, \\ b_t &= \varphi \, b_{t-1} + \beta \, \varepsilon_t, \\ s_t &= s_{t-m} + \gamma \, \varepsilon_t, \end{align*}
with the coefficient map \beta = \beta^{*} \alpha and \gamma = \gamma^{*} (1 - \alpha). The two forms are mathematically equivalent, but the SSOE form is the one we want for probabilistic forecasting. In sample, the innovation is exactly the one-step-ahead forecast error \varepsilon_t = y_t - \mu_t, so the whole state trajectory is a deterministic function of the observed data and the parameters. Out of sample there is no data, so \varepsilon_t is sampled and fed back into the level, trend, and seasonal updates. Because a single innovation drives every component, the forecast uncertainty compounds and the prediction interval widens with the horizon, which is the behavior we expect from a genuine stochastic process.
The model
We implement the SSOE model as a functional numpyro_forecast model body. A model body receives the per-call Horizon (which exposes the observed data h.data, the number of in-sample steps h.t_obs, and the forecast length h.future) plus the covariates, and registers its sample sites. Wrapping it with forecasting_model turns it into the standard (covariates, data=None) callable that HMCForecaster and Predictive consume.
The body does two things with scan, neither of which contains a NumPyro sample site (so plain jax.lax.scan is all we need, and reverse-mode automatic differentiation works out of the box):
- In sample. A deterministic filter consumes the observed series to produce the one-step-ahead means \mu_t; the whole in-sample likelihood is then a single
Normalobservation site"obs". We also expose \mu_t as a deterministic site"mu"for the in-sample fit plot. - Out of sample. When
h.future > 0we draw the horizon innovations from the prior at a separate"eps_future"site, roll the state forward feeding those innovations back, and expose the result as the deterministic"forecast"site that the forecaster reads. Because"eps_future"does not exist while training,Predictivedraws it from the prior at forecast time, exactly like the built-in_futuresites.
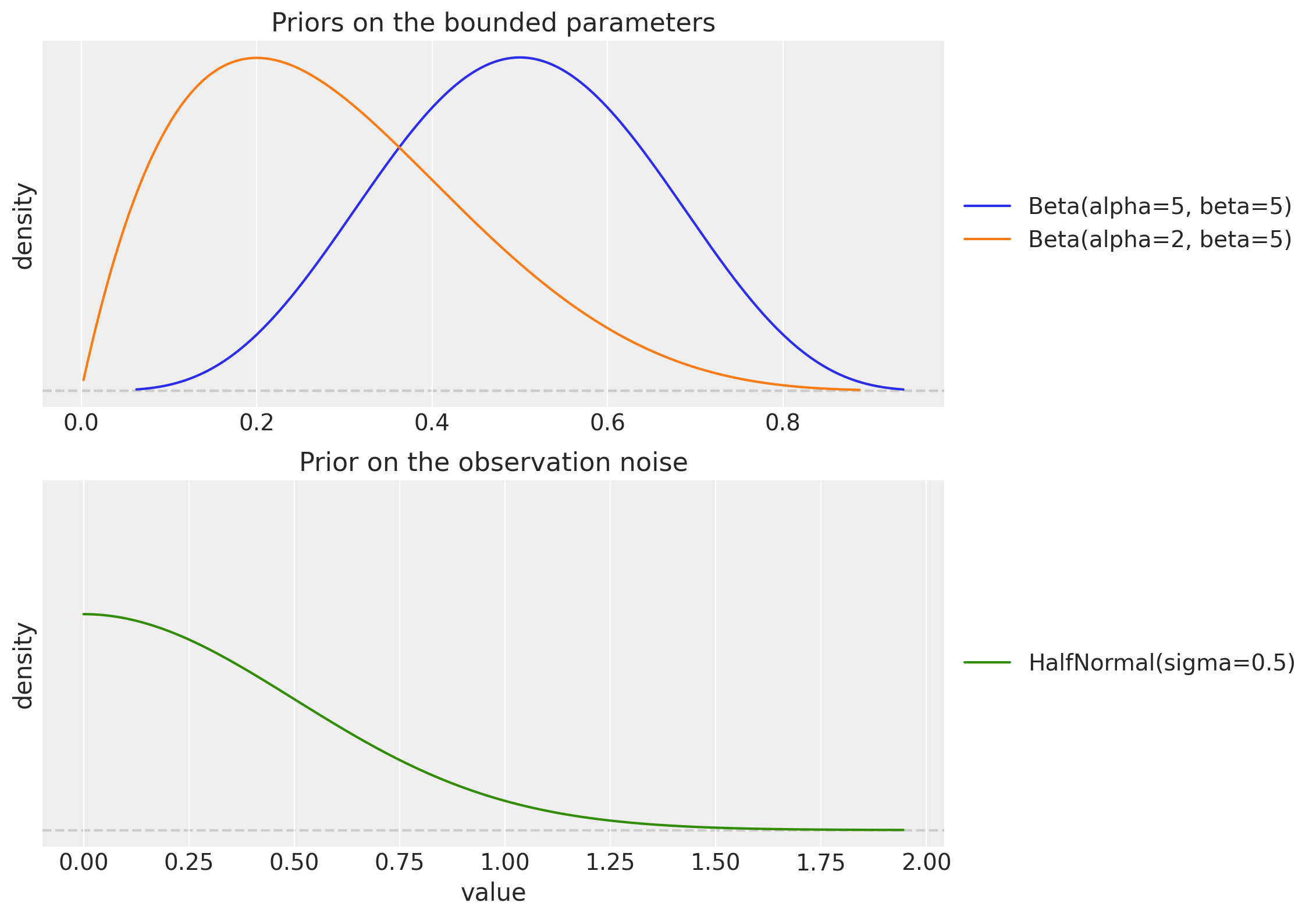
The priors follow the source post: \text{Beta}(5, 5) on the level, trend, and seasonal smoothing parameters (flat enough near the boundaries to avoid a funnel-shaped posterior), \text{Beta}(2, 5) on the damping factor (favoring some damping), a tight \text{HalfNormal}(0.5) on the noise, and weakly informative priors on the initial states.
def exponential_smoothing_ssm(h: Horizon, covariates: Array) -> None:
"""Damped Holt-Winters exponential smoothing in innovations state space form."""
if h.data is None:
msg = "the exponential smoothing model requires observed data"
raise ValueError(msg)
y_obs = h.data[..., 0]
# Smoothing parameters, damping, initial states, and observation noise.
level_smoothing = numpyro.sample("level_smoothing", dist.Beta(5, 5))
level_init = numpyro.sample("level_init", dist.Normal(y_obs[0], 1))
trend_smoothing = numpyro.sample("trend_smoothing", dist.Beta(5, 5))
trend_init = numpyro.sample("trend_init", dist.Normal(0, 0.1))
seasonality_smoothing = numpyro.sample("seasonality_smoothing", dist.Beta(5, 5))
phi = numpyro.sample("phi", dist.Beta(2, 5))
with numpyro.plate("n_seasons", n_seasons):
seasonality_init = numpyro.sample("seasonality_init", dist.Normal(0, 1))
noise = numpyro.sample("noise", dist.HalfNormal(0.5))
# Component form to SSOE coefficient map.
beta = trend_smoothing * level_smoothing
gamma = seasonality_smoothing * (1 - level_smoothing)
def advance(carry, innovation):
# Shared state update: one innovation drives level, trend, and seasonality.
level, trend, seasonality = carry
level = level + phi * trend + level_smoothing * innovation
trend = phi * trend + beta * innovation
new_season = seasonality[0] + gamma * innovation
seasonality = jnp.concatenate([seasonality[1:], new_season[None]])
return (level, trend, seasonality)
def transition(carry, y_t):
level, trend, seasonality = carry
mu = level + phi * trend + seasonality[0]
error = y_t - mu # in-sample innovation = one-step-ahead forecast error
return advance(carry, error), mu
init_state = (level_init, trend_init, seasonality_init)
final_state, mu = jax.lax.scan(transition, init_state, y_obs)
numpyro.deterministic("mu", mu[:, None])
numpyro.sample("obs", dist.Normal(mu[:, None], noise), obs=h.data)
if h.future > 0:
eps_future = numpyro.sample(
"eps_future", dist.Normal(0, noise).expand([h.future]).to_event(1)
)
def forecast_step(carry, eps):
level, trend, seasonality = carry
mu = level + phi * trend + seasonality[0]
y_hat = mu + eps # sampled innovation is fed back into the state
return advance(carry, eps), y_hat
_, y_future = jax.lax.scan(forecast_step, final_state, eps_future)
numpyro.deterministic("forecast", y_future[:, None])
model = forecasting_model(exponential_smoothing_ssm)Priors
Before fitting, it is worth looking at the priors on the bounded parameters. The \text{Beta}(5, 5) prior on the smoothing parameters is symmetric and concentrated away from 0 and 1, which keeps the sampler away from the boundary regions where the posterior geometry degenerates. The \text{Beta}(2, 5) prior on the damping factor \varphi puts more mass below 0.5, encoding a mild preference for damped (non-explosive) trends.
fig, (ax_smoothing, ax_noise) = plt.subplots(
nrows=2,
ncols=1,
figsize=(10, 9),
sharex=False,
sharey=True,
layout="constrained",
)
pz.Beta(5, 5).plot_pdf(ax=ax_smoothing, color="C0")
pz.Beta(2, 5).plot_pdf(ax=ax_smoothing, color="C1")
ax_smoothing.set(
title="Priors on the bounded parameters",
xlabel=None,
ylabel="density",
)
pz.HalfNormal(0.5).plot_pdf(ax=ax_noise, color="C2")
ax_noise.set(
title="Prior on the observation noise",
xlabel="value",
ylabel="density",
);
Inference
We fit the model with the NUTS sampler through HMCForecaster, running 4 chains of 2{,}000 warmup and 2{,}000 sampling steps each. HMCForecaster takes the model, the in-sample data, and the covariates over the training window, and runs the No-U-Turn Sampler under the hood.
rng_key, rng_subkey = random.split(rng_key)
forecaster = HMCForecaster(
rng_subkey,
model,
train_data,
covariates_train,
num_warmup=2_000,
num_samples=2_000,
num_chains=4,
)Diagnostics
HMCForecaster stores the posterior draws with the chains flattened together. NumPyro flattens the chains in order, so we can recover the (chain, draw) structure with a plain reshape and hand it to ArviZ for the standard convergence diagnostics.
num_chains = 4
posterior = {
name: np.asarray(value).reshape(num_chains, -1, *value.shape[1:])
for name, value in forecaster.posterior_samples.items()
}
idata = az.from_dict({"posterior": posterior})
scalar_vars = [
"level_smoothing",
"trend_smoothing",
"seasonality_smoothing",
"phi",
"noise",
"level_init",
"trend_init",
]
rhat = az.rhat(idata, var_names=scalar_vars)
ess_bulk = az.ess(idata, var_names=scalar_vars)
ess_tail = az.ess(idata, var_names=scalar_vars, method="tail")
diagnostics = pd.DataFrame(
{
"r_hat": [float(rhat[name].item()) for name in scalar_vars],
"ess_bulk": [float(ess_bulk[name].item()) for name in scalar_vars],
"ess_tail": [float(ess_tail[name].item()) for name in scalar_vars],
},
index=scalar_vars,
)
diagnostics.round({"r_hat": 3, "ess_bulk": 0, "ess_tail": 0})| r_hat | ess_bulk | ess_tail | |
|---|---|---|---|
| level_smoothing | 1.001 | 3518.0 | 3720.0 |
| trend_smoothing | 1.001 | 3845.0 | 3933.0 |
| seasonality_smoothing | 1.001 | 2437.0 | 3276.0 |
| phi | 1.002 | 3492.0 | 3991.0 |
| noise | 1.001 | 3383.0 | 3855.0 |
| level_init | 1.007 | 869.0 | 1398.0 |
| trend_init | 1.001 | 3796.0 | 4569.0 |
The \hat{R} values are close to 1 and the effective sample sizes are healthy, which indicates that the chains have mixed well. This is the payoff of the state space parameterization together with the tuned priors: the posterior geometry is well behaved and the sampler explores it without trouble. The trace plots below confirm the good mixing.
pc_trace = az.plot_trace_dist(
idata,
var_names=scalar_vars,
figure_kwargs={"figsize": (10, 16)},
compact=True,
)
pc_trace.viz["figure"].item().suptitle(
"Trace plots",
fontsize=18,
fontweight="bold",
y=1.03,
)
plt.show()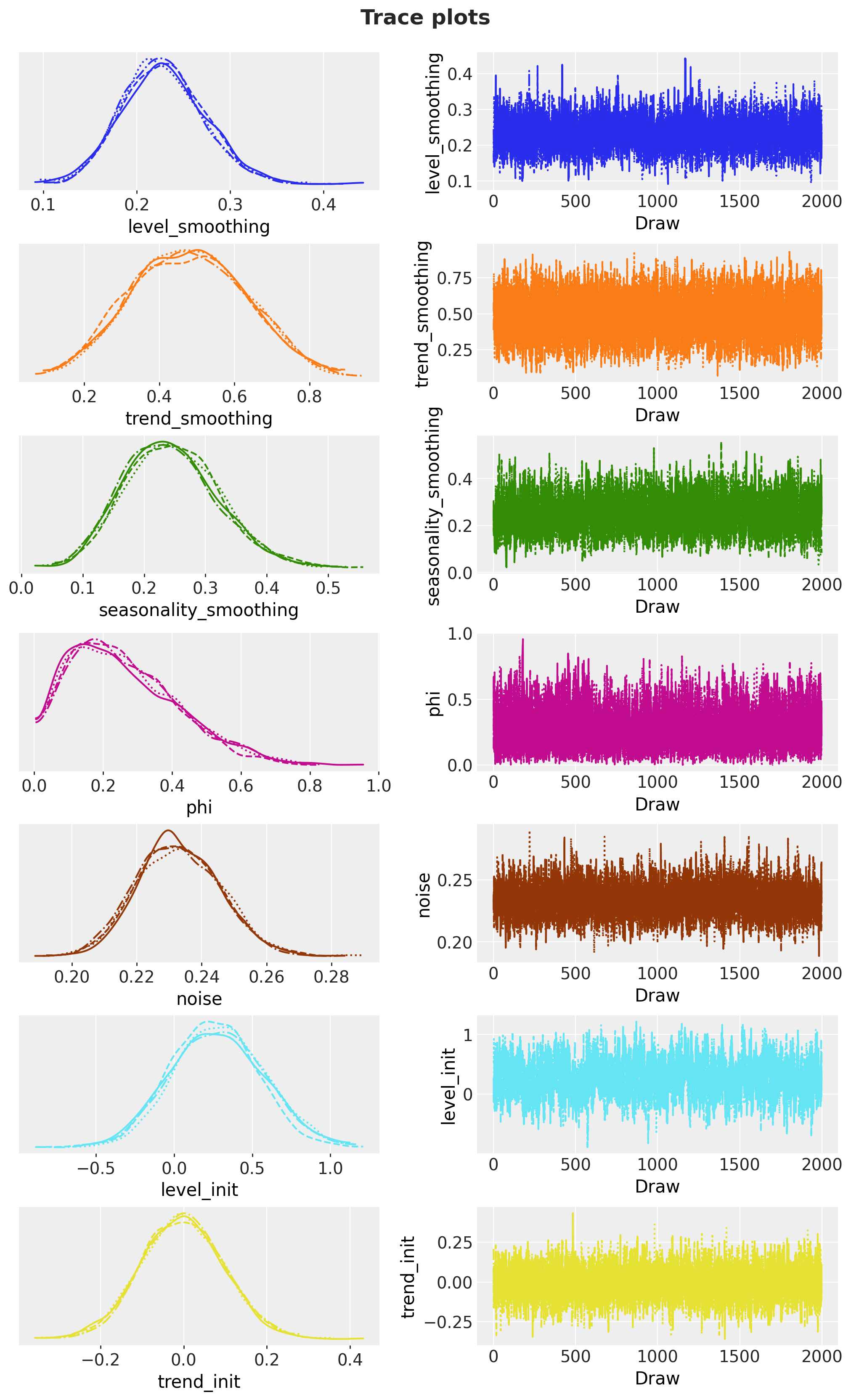
Forecast
We now generate the forecast over the test horizon. Calling the fitted forecaster with the full-horizon covariates returns forecast samples of shape (sample, future, obs): for each posterior draw the model replays the in-sample filter, then rolls the state forward while sampling fresh innovations. For the in-sample fit we draw the one-step-ahead posterior predictive (the fitted mean plus observation noise).
num_forecast_samples = 2_000
rng_key, rng_subkey = random.split(rng_key)
forecast_samples = forecaster(
rng_subkey, train_data, covariates_full, num_samples=num_forecast_samples
)
# In-sample one-step-ahead posterior predictive: fitted mean "mu" plus observation noise.
rng_key, rng_subkey = random.split(rng_key)
mu_in_sample = Predictive(
model, posterior_samples=forecaster.posterior_samples, return_sites=["mu"]
)(rng_subkey, covariates_train, train_data)["mu"]
noise_samples = forecaster.posterior_samples["noise"][:, None, None]
rng_key, rng_subkey = random.split(rng_key)
in_sample_pp = mu_in_sample + noise_samples * random.normal(rng_subkey, mu_in_sample.shape)
print(f"in-sample posterior predictive: {in_sample_pp.shape}")
print(f"forecast samples: {forecast_samples.shape}")in-sample posterior predictive: (8000, 192, 1)
forecast samples: (2000, 48, 1)We visualize both the in-sample fit and the forecast with az.plot_lm, showing the 50\% and 94\% HDI bands. The forecast band (in orange) clearly fans out as the horizon grows: this is the calibrated uncertainty that the innovations state space form provides.
crps_train = eval_crps(in_sample_pp, train_data)
crps_test = eval_crps(forecast_samples, test_data)
idata_in_sample = az.from_dict(
{
"posterior_predictive": {"obs": np.asarray(in_sample_pp[..., 0])[None]},
"observed_data": {"obs": np.asarray(y_train)},
"constant_data": {"time": np.asarray(t_train)},
},
coords={"t": np.asarray(t_train)},
dims={"obs": ["t"], "time": ["t"]},
)
idata_forecast = az.from_dict(
{
"posterior_predictive": {"obs": np.asarray(forecast_samples[..., 0])[None]},
"observed_data": {"obs": np.asarray(y_test)},
"constant_data": {"time": np.asarray(t_test)},
},
coords={"t": np.asarray(t_test)},
dims={"obs": ["t"], "time": ["t"]},
)
pc = az.plot_lm(
idata_in_sample,
y="obs",
x="time",
ci_kind="hdi",
ci_prob=(0.5, 0.94),
smooth=False,
visuals={"ci_band": {"color": "C0"}, "observed_scatter": False, "pe_line": False},
figure_kwargs={"figsize": (12, 7)},
)
in_sample_bands = pc.viz["ci_band"]["time"]
band_in_94 = in_sample_bands.sel(prob=0.94).item()
band_in_50 = in_sample_bands.sel(prob=0.5).item()
az.plot_lm(
idata_forecast,
y="obs",
x="time",
plot_collection=pc,
ci_kind="hdi",
ci_prob=(0.5, 0.94),
smooth=False,
visuals={"ci_band": {"color": "C1"}, "observed_scatter": False, "pe_line": False},
)
forecast_bands = pc.viz["ci_band"]["time"]
band_fc_94 = forecast_bands.sel(prob=0.94).item()
band_fc_50 = forecast_bands.sel(prob=0.5).item()
ax = pc.viz["figure"].item().axes[0]
band_in_94.set_label(r"in-sample $94\%$ HDI")
band_in_50.set_label(r"in-sample $50\%$ HDI")
band_fc_94.set_label(r"forecast $94\%$ HDI")
band_fc_50.set_label(r"forecast $50\%$ HDI")
(observed_line,) = ax.plot(np.asarray(t), np.asarray(y), color="black", lw=1, label="observed")
split_line = ax.axvline(float(t_test[0]), color="gray", linestyle="--", label="train/test split")
ax.legend(
handles=[band_in_94, band_in_50, band_fc_94, band_fc_50, observed_line, split_line],
loc="upper center",
bbox_to_anchor=(0.5, -0.1),
ncol=3,
)
ax.set(
title=f"Exponential smoothing forecast (train CRPS: {crps_train:.3f}, test CRPS: {crps_test:.3f})",
xlabel="time",
ylabel="y",
)
plt.show()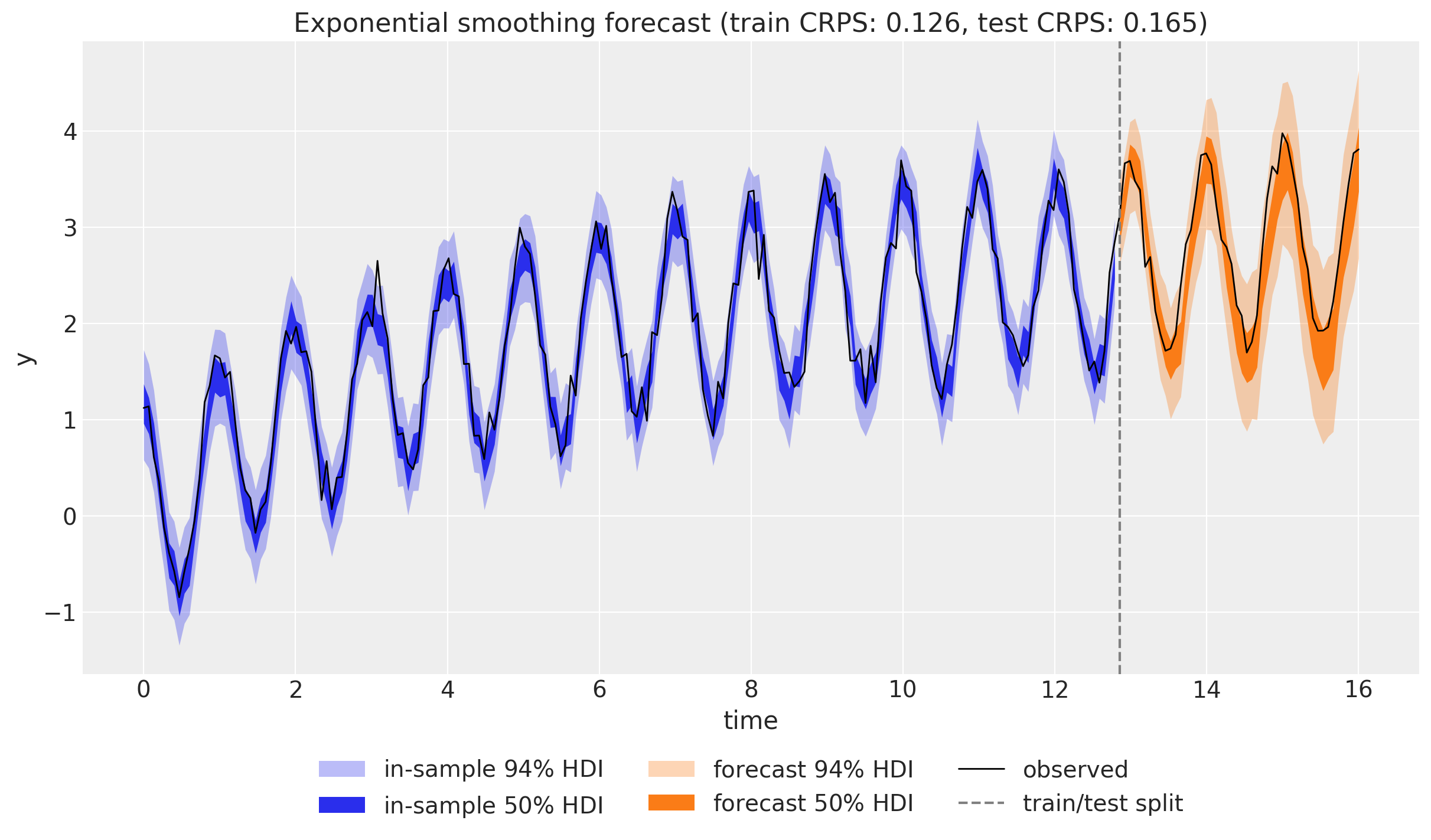
Evaluation
Finally, we score the forecast against the held-out test set with the package’s evaluation metrics: mean absolute error and root mean squared error (point-forecast accuracy), the continuous ranked probability score (a proper score for the whole predictive distribution), and the empirical coverage of the central 90\% interval (calibration).
metrics = {
"MAE": eval_mae(forecast_samples, test_data),
"RMSE": eval_rmse(forecast_samples, test_data),
"CRPS": eval_crps(forecast_samples, test_data),
"coverage (90%)": eval_coverage(forecast_samples, test_data, alpha=0.9),
}
for name, value in metrics.items():
print(f"{name:>16}: {value:.4f}") MAE: 0.2433
RMSE: 0.2796
CRPS: 0.1651
coverage (90%): 0.9583The coverage of the central 90\% interval sits close to its nominal level, confirming that the forecast is well calibrated. For a systematic assessment over multiple origins you would reach for numpyro_forecast.backtest, which refits the model on a moving window; we omit it here because it retrains the full sampler for every window.
References
- Hyndman, R. J., & Athanasopoulos, G. (2021). Forecasting: Principles and Practice, 3rd edition. Chapters on exponential smoothing and ETS models.
- Hyndman, R. J., Koehler, A. B., Ord, J. K., & Snyder, R. D. (2008). Forecasting with Exponential Smoothing: The State Space Approach. Springer.
- Orduz, J. Exponential Smoothing with NumPyro: State Space Form.
- Orduz, J. Notes on Exponential Smoothing with NumPyro.